Module 01
Chassis
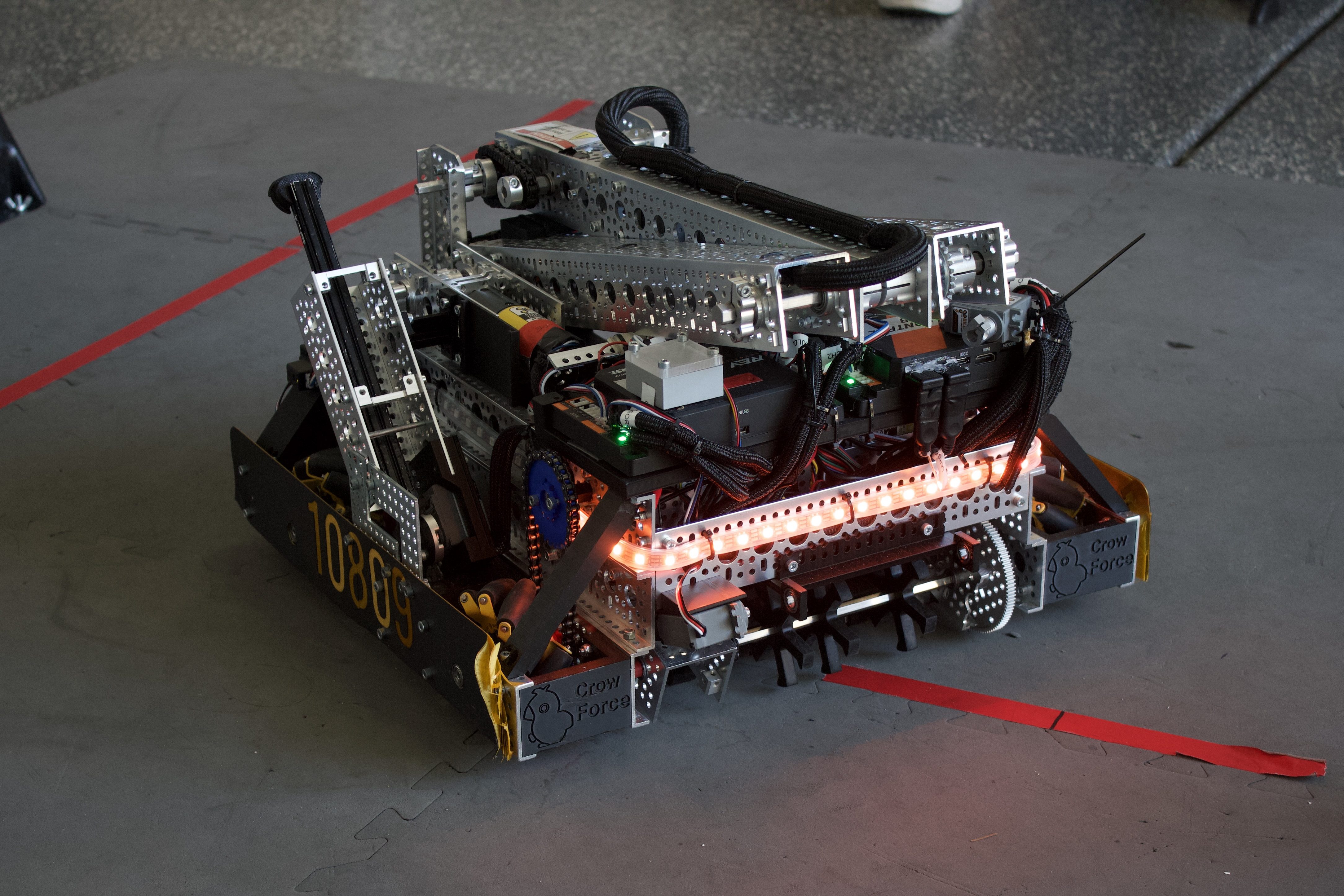
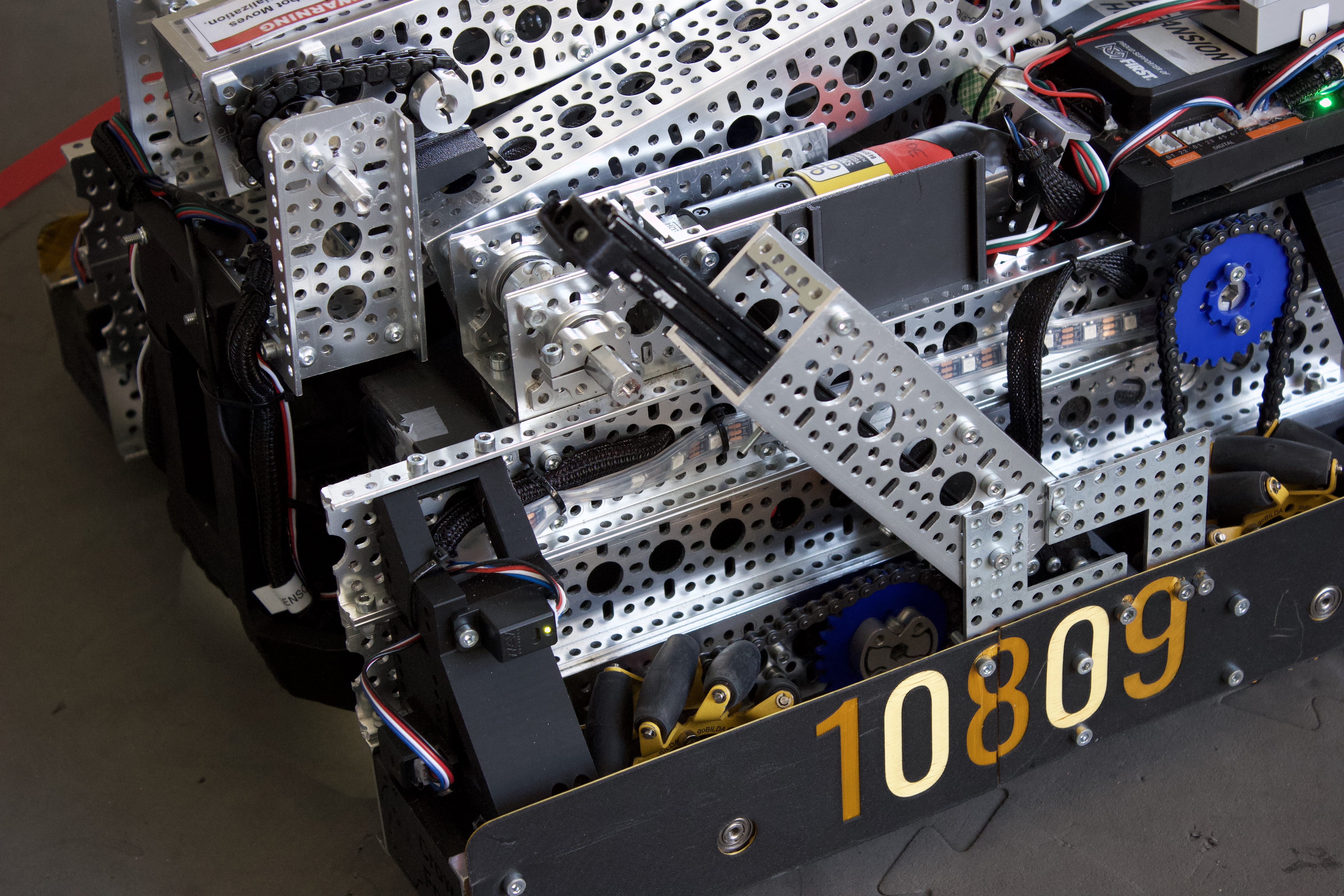
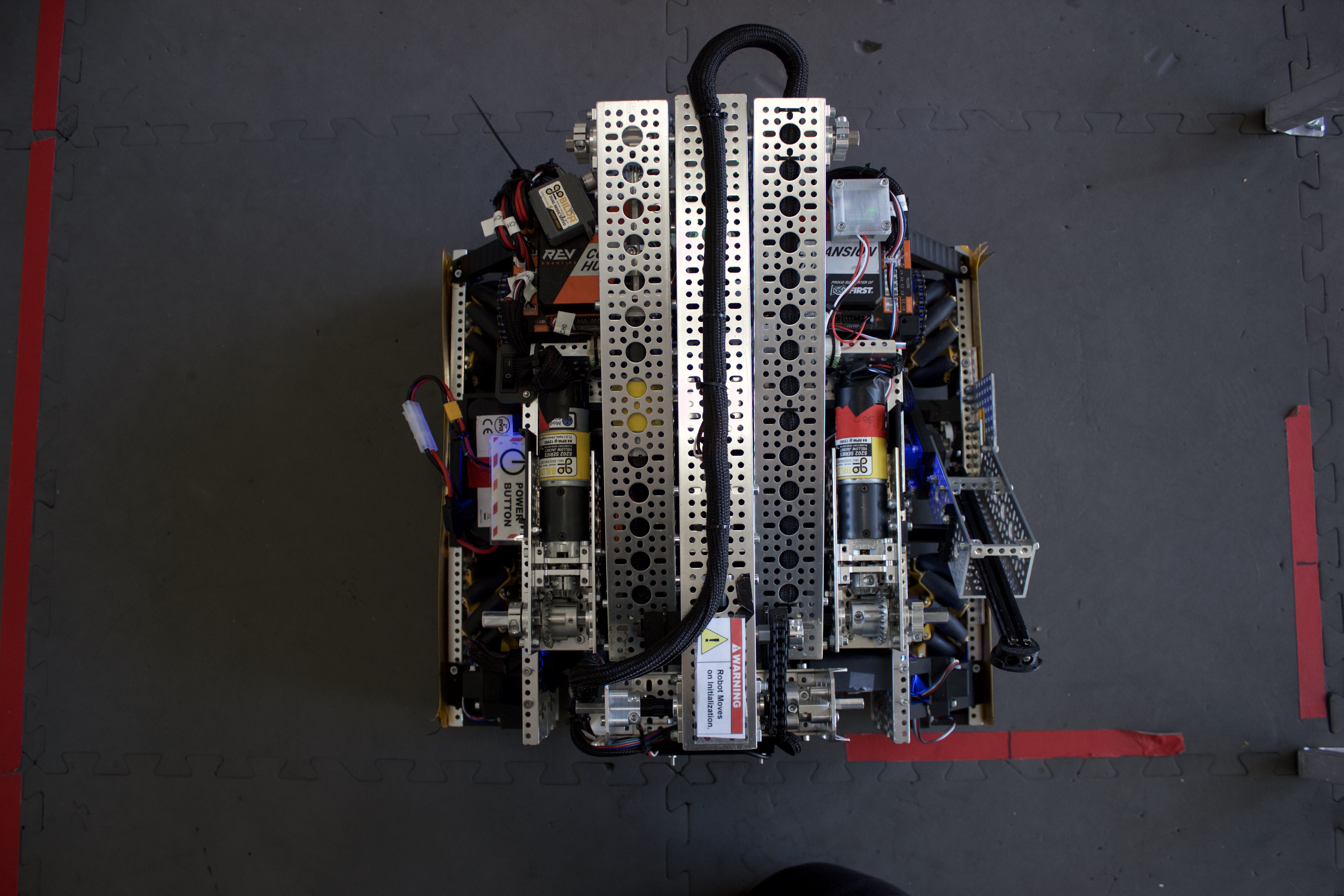
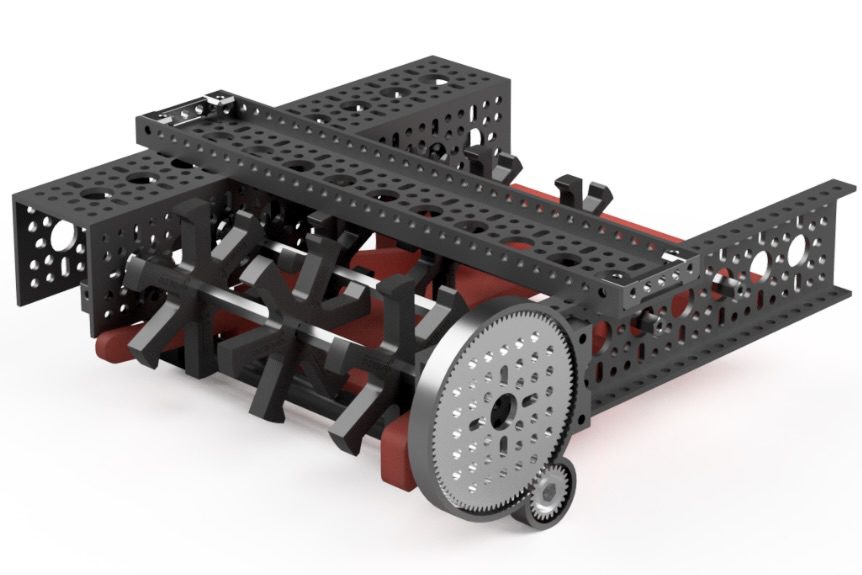
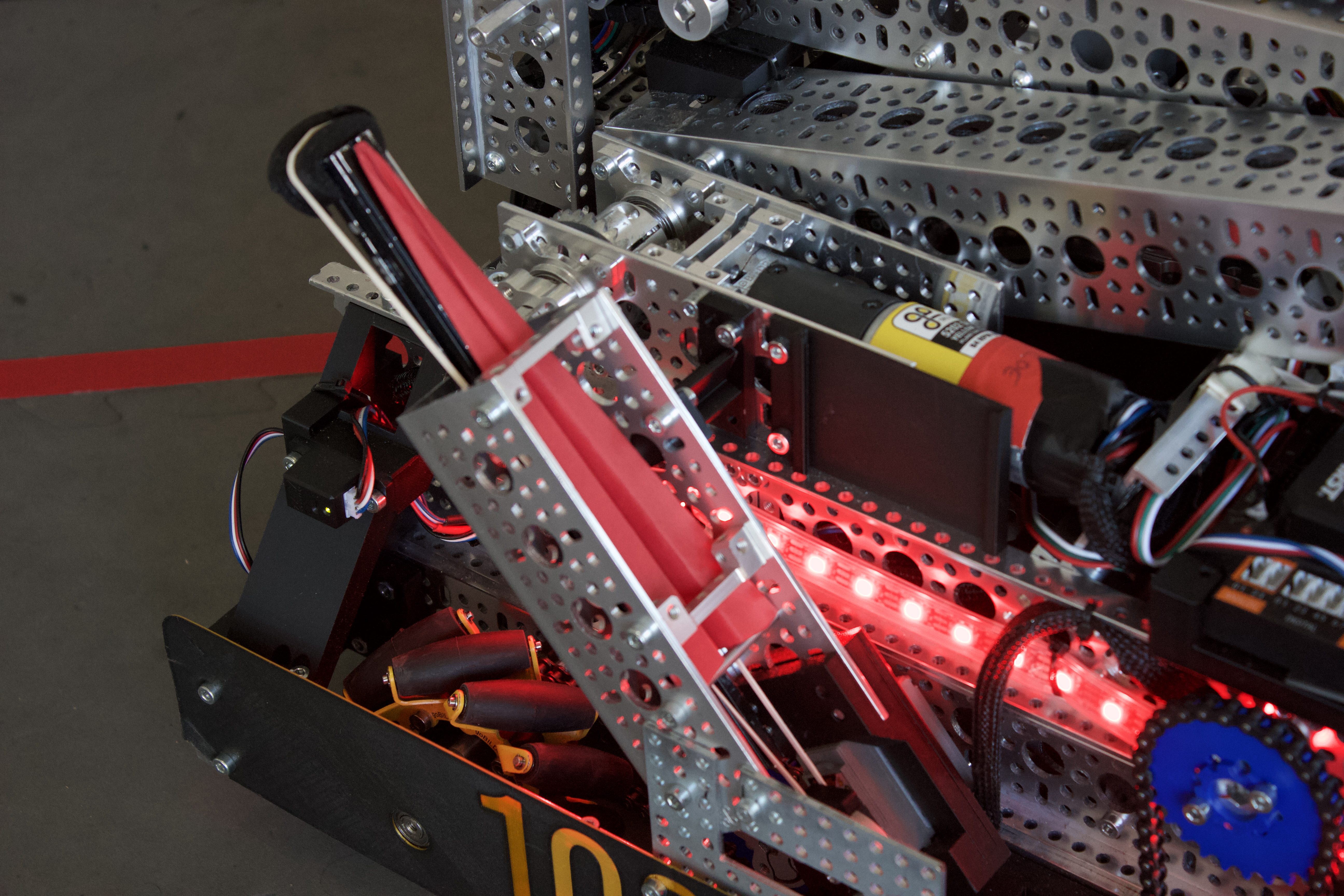
Last season, our cube-shaped chassis made repairs harder and raised the center of mass. This season's juggernaut-style chassis is lower, more stable, and much easier to service.
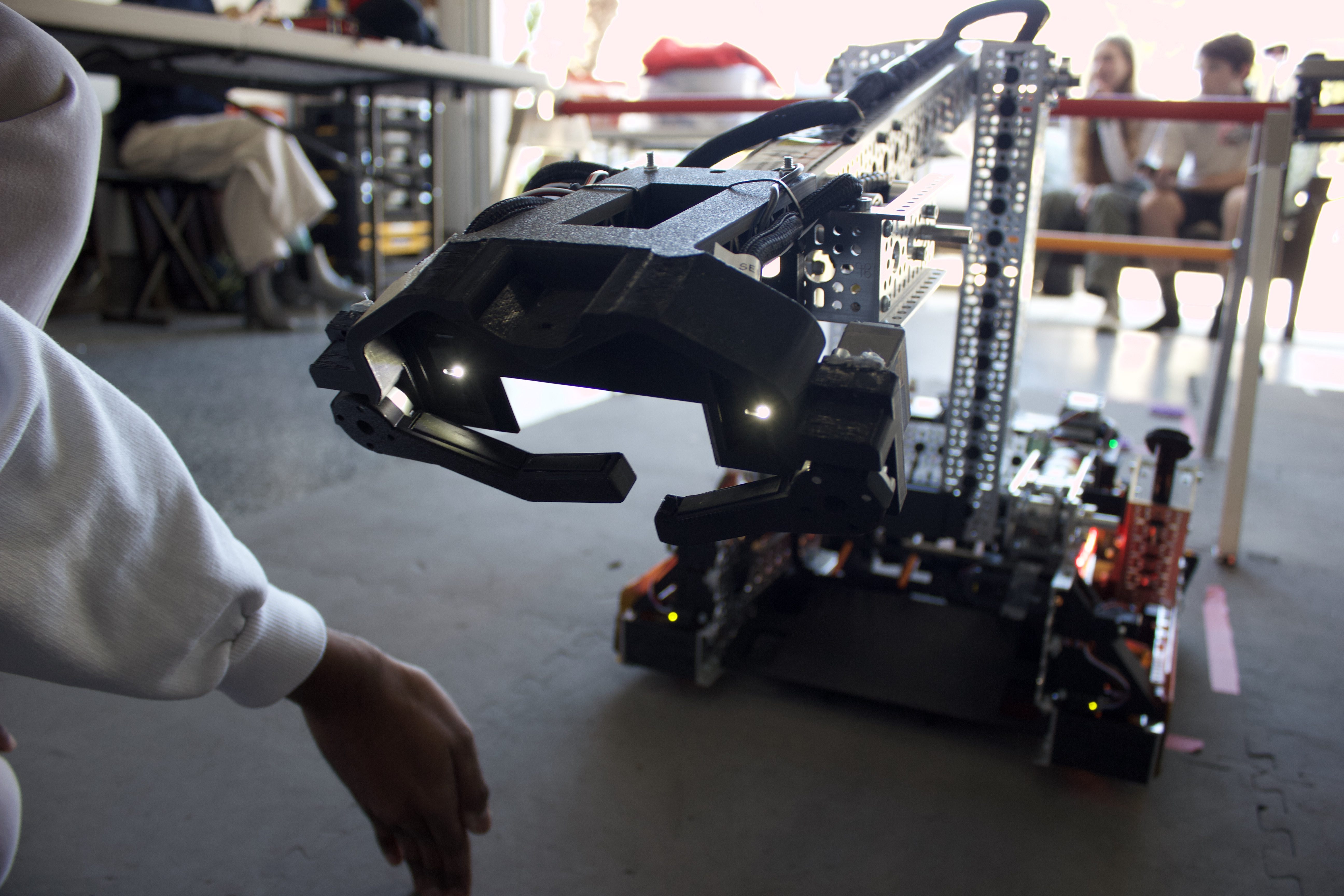
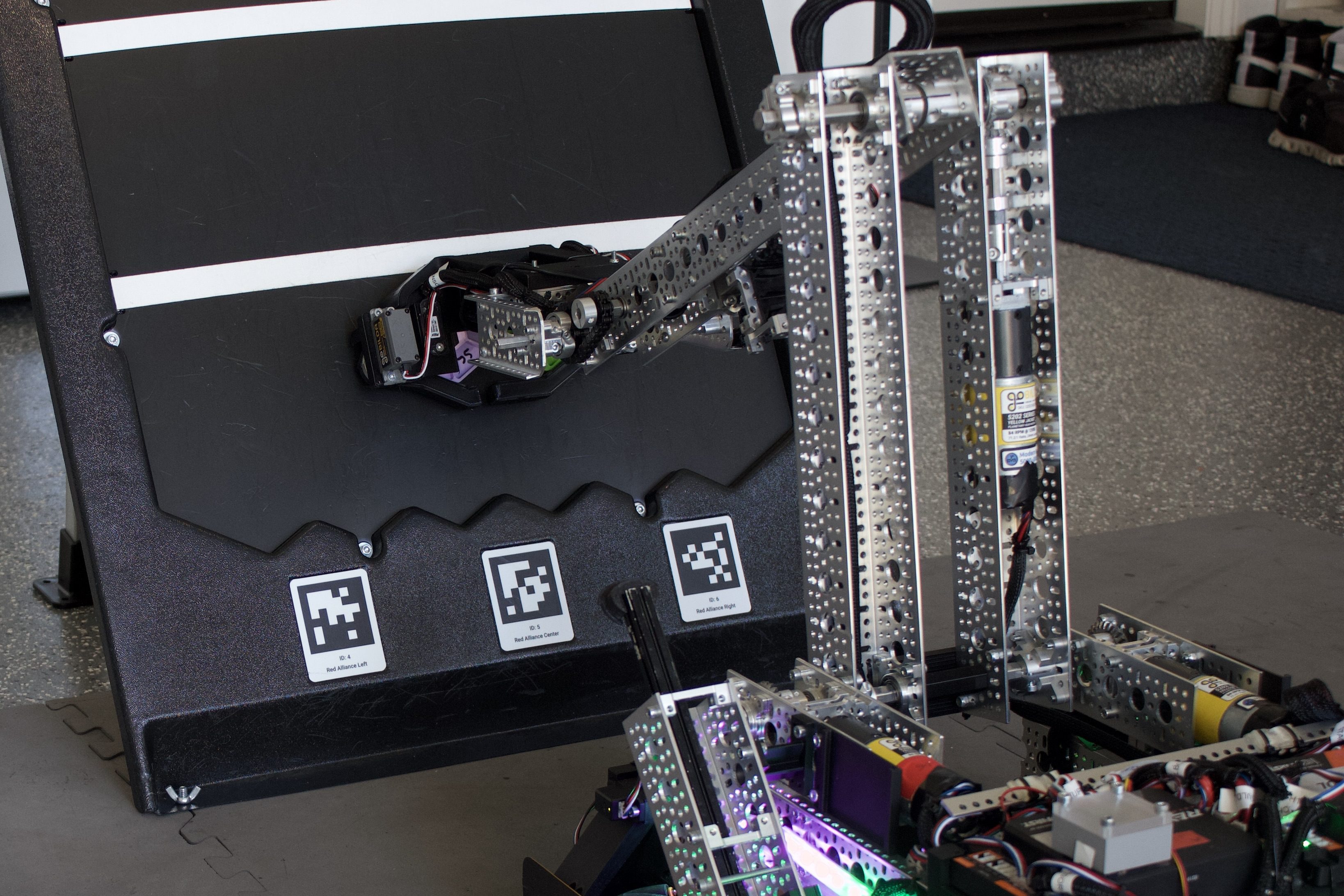
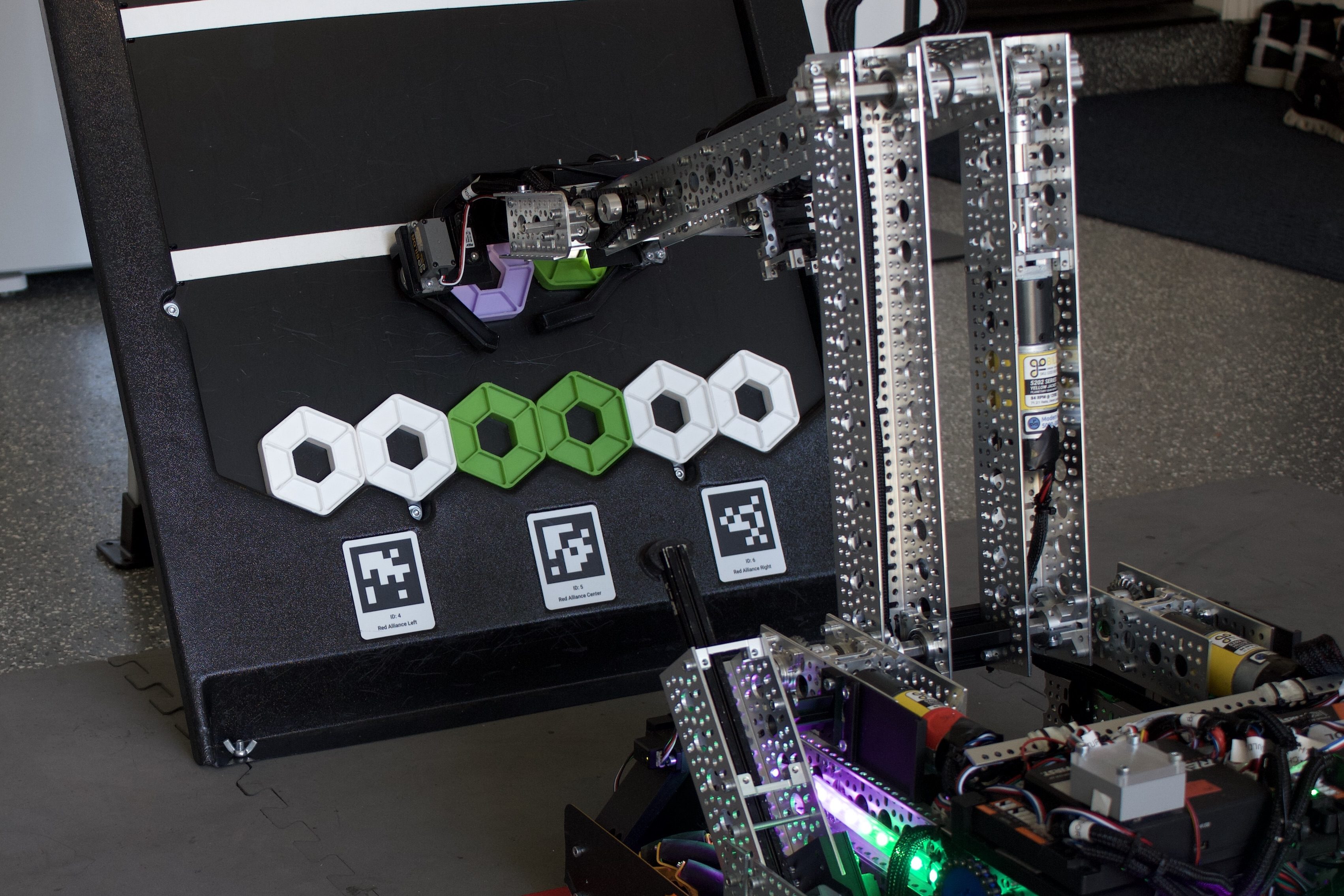
We designed the robot in Fusion 360 around a modular system so the chassis, arm, and intake could each be improved without rebuilding everything. Compared with last season, the new intake and outtake run through the full robot, sort two pixels into predictable positions, and give our drivers more control. We also replaced the linear slides with a triple-jointed arm for better floor pickup, faster scoring, and a stronger hanging setup.

Interleague B was our fourth event of the season. We finished qualification matches in first, but an early elimination exit cut our playoff run short. Even so, it was one of our strongest judged events, and we won every award, including 1st Place Inspire.







Regionals was our final event of the season. We showed promise early, but robot issues kept us out of the elimination rounds. Even with that setback, we earned the 1st Place Design Award.